Python实现动态规划Labeling算法求解SPPRC问题 |
您所在的位置:网站首页 › 动态规划 python › Python实现动态规划Labeling算法求解SPPRC问题 |
Python实现动态规划Labeling算法求解SPPRC问题
|
Python实现一种Labeling算法求解SPPRC问题
SPPRC问题
Labeling算法
Python编程实现
首先在python中对该图进行定义:
创建Label类
调用labeling算法计算
本文中的课件来自清华大学深圳国际研究生院,物流与交通学部戚铭尧教授《物流地理信息系统》课程。 SPPRC问题带资源约束的最短路径问题(shortest path problem with resource constraints)是一个众所周知的NP-Hard问题。 除了作为网络问题直接应用外,SPPRC还用作列生成解决方案方法的基础,用于解决车辆路径规划问题和人员排班问题等。 考虑一个有向图 G = ( N , A ) G = (N,A) G=(N,A), N = { v 1 , v 2 , . . . , v i , . . . , v n } N=\{v_1,v_2,...,v_i,...,v_n\} N={v1,v2,...,vi,...,vn}表示节点的集合,并且 A = { ( i , j ) ∣ v i ∈ N , v j ∈ N , i ≠ j } A=\{(i,j)|v_i \in N,v_j \in N ,i \ne j\} A={(i,j)∣vi∈N,vj∈N,i=j}表示弧的集合。对于每一段弧 ( i , j ) ∈ A (i,j)\in A (i,j)∈A都有一个非负的权重(vrptw问题中可能为负,需要作特殊处理), c i j c_{ij} cij和 t i j t_{ij} tij,表示通过这段弧的成本和资源消耗。 SPPRC问题包括找到从起始节点 v s ∈ N v_s \in N vs∈N到结束节点 v t ∈ N v_t \in N vt∈N的一条路径 P P P,使该路径的总成本最小化,但不超过最大资源消耗 T T T。即使只存在一种资源,SPPRC也是一个NP-Hard。 Labeling算法直接求解SPPRC问题是比较困难的,故通常采用一种动态规划的方法: l a b e l c o r r e c t i o n a l g o r i t h m label \ correction \ algorithm label correction algorithm算法。 通常我们考虑有 L L L种资源,可能包括时间、最大装载重量、最大装载体积等。 对于每一条从起始节点 v s v_s vs扩展到点 v i v_i vi的路径 X p i X_{pi} Xpi都有一个标签 ( R i , C i ) (R_i,C_i) (Ri,Ci)与之相关联。 R i ≡ ( T i 1 , T i 2 , . . . , T i L ) R_i \equiv (T_i^1,T_i^2,...,T_i^ L) Ri≡(Ti1,Ti2,...,TiL)是路径使用的每L个资源的数量; C i C_i Ci是 c o s t cost cost。 此外,我们还需要设置一些优超规则,称为 d o m i n a n c e r u l e dominance\ rule dominance rule,以帮助减少不必要的扩展。令 X p i X_{pi} Xpi和 X p i ∗ X_{pi}^* Xpi∗是从 v s v_s vs扩展到 v i v_i vi的两条不同的路径,与之关联的标签分别为 ( R i , C i ) (R_i,C_i) (Ri,Ci)和 ( R i ∗ , C i ∗ ) (R_i^*,C_i^*) (Ri∗,Ci∗)。路径 X p i X_{pi} Xpi可以 d o m i n a t e s dominates dominates路径 X p i ∗ X_{pi}^* Xpi∗当且仅当: C i ≤ C i ∗ , T i l ≤ T i l ∗ , ∀ l ∈ ( 1 , . . . , L ) , ( R i , C i ) ≠ ( R i ∗ , C i ∗ ) C_i \le C_i^*,T_i^l\le T_i^{l*} ,\forall \ l \in (1,...,L), (R_i,C_i) \ne (R_i^*,C_i^*) Ci≤Ci∗,Til≤Til∗,∀ l∈(1,...,L),(Ri,Ci)=(Ri∗,Ci∗) 下面介绍一个简单的小例子:
|
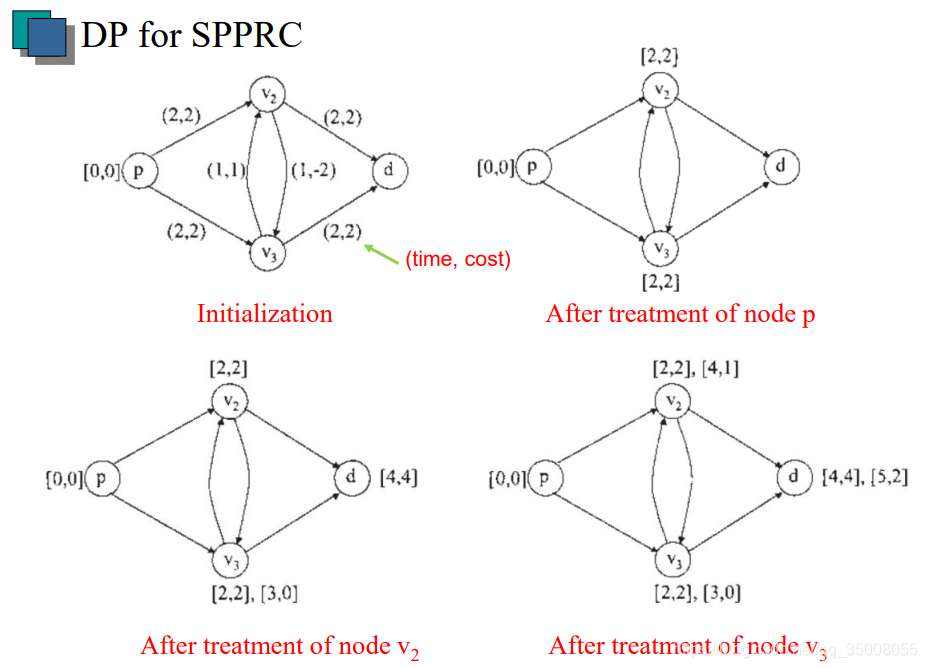 一个有向图如上图所示,我们可以看到每一段弧上都有一个非负的权重,分别表示通过该弧的 t i m e time time与 c o s t cost cost。首先初始化出发节点 p p p的标签,设置为 [ 0 , 0 ] [0,0] [0,0],随后令其向可达节点 v 2 v_2 v2和 v 3 v_3 v3进行扩展,则分别设置一个新的标签 [ 2 , 2 ] [2,2] [2,2]。再由 v 2 v_2 v2向 v 3 v_3 v3和 d d d进行扩展,则 v 3 v_3 v3得到一个新的标签 [ 3 , 0 ] [3,0] [3,0], d d d得到一个新的标签 [ 4 , 4 ] [4,4] [4,4],同理继续扩展到 d d d,生成一个新的标签 [ 5 , 2 ] [5,2] [5,2]。然后回过头由 v 3 v_3 v3扩展到 v 2 v_2 v2, v 2 v_2 v2得到一个新的标签 [ 4 , 1 ] [4,1] [4,1]。我们可以发现没有继续向 d d d扩展了,因为其生成的标签为 [ 6 , 2 ] [6,2] [6,2],与 d d d已有的标签 [ 5 , 2 ] [5,2] [5,2]相比满足了 d o m i n a n c e r u l e dominance\ rule dominance rule的要求,不必再扩展。
一个有向图如上图所示,我们可以看到每一段弧上都有一个非负的权重,分别表示通过该弧的 t i m e time time与 c o s t cost cost。首先初始化出发节点 p p p的标签,设置为 [ 0 , 0 ] [0,0] [0,0],随后令其向可达节点 v 2 v_2 v2和 v 3 v_3 v3进行扩展,则分别设置一个新的标签 [ 2 , 2 ] [2,2] [2,2]。再由 v 2 v_2 v2向 v 3 v_3 v3和 d d d进行扩展,则 v 3 v_3 v3得到一个新的标签 [ 3 , 0 ] [3,0] [3,0], d d d得到一个新的标签 [ 4 , 4 ] [4,4] [4,4],同理继续扩展到 d d d,生成一个新的标签 [ 5 , 2 ] [5,2] [5,2]。然后回过头由 v 3 v_3 v3扩展到 v 2 v_2 v2, v 2 v_2 v2得到一个新的标签 [ 4 , 1 ] [4,1] [4,1]。我们可以发现没有继续向 d d d扩展了,因为其生成的标签为 [ 6 , 2 ] [6,2] [6,2],与 d d d已有的标签 [ 5 , 2 ] [5,2] [5,2]相比满足了 d o m i n a n c e r u l e dominance\ rule dominance rule的要求,不必再扩展。 考虑这样一个有向图。
考虑这样一个有向图。【本文地址】
今日新闻 |
推荐新闻 |